VTA 硬件指南
我们提供了 VTA 硬件设计的自上而下的概述。本硬件设计指南包含两个级别的 VTA 硬件:
- VTA 设计及其 ISA 硬件-软件接口的架构概述。
- VTA 硬件模块的微架构概述,以及计算 core 的微代码规范。
VTA 概述
VTA 是一种通用深度学习加速器,专为快速高效的密集线性代数而构建。VTA 包含一个简单的类似 RISC 的处理器,可以在秩(rank)为 1 或 2 的张量寄存器上执行密集线性代数运算。此外,该设计采用解耦的访问执行,来隐藏内存访问延迟。
在更广的范围内,VTA 可以作为全栈优化的模板深度学习加速器设计,将通用张量计算接口提供给编译器栈。
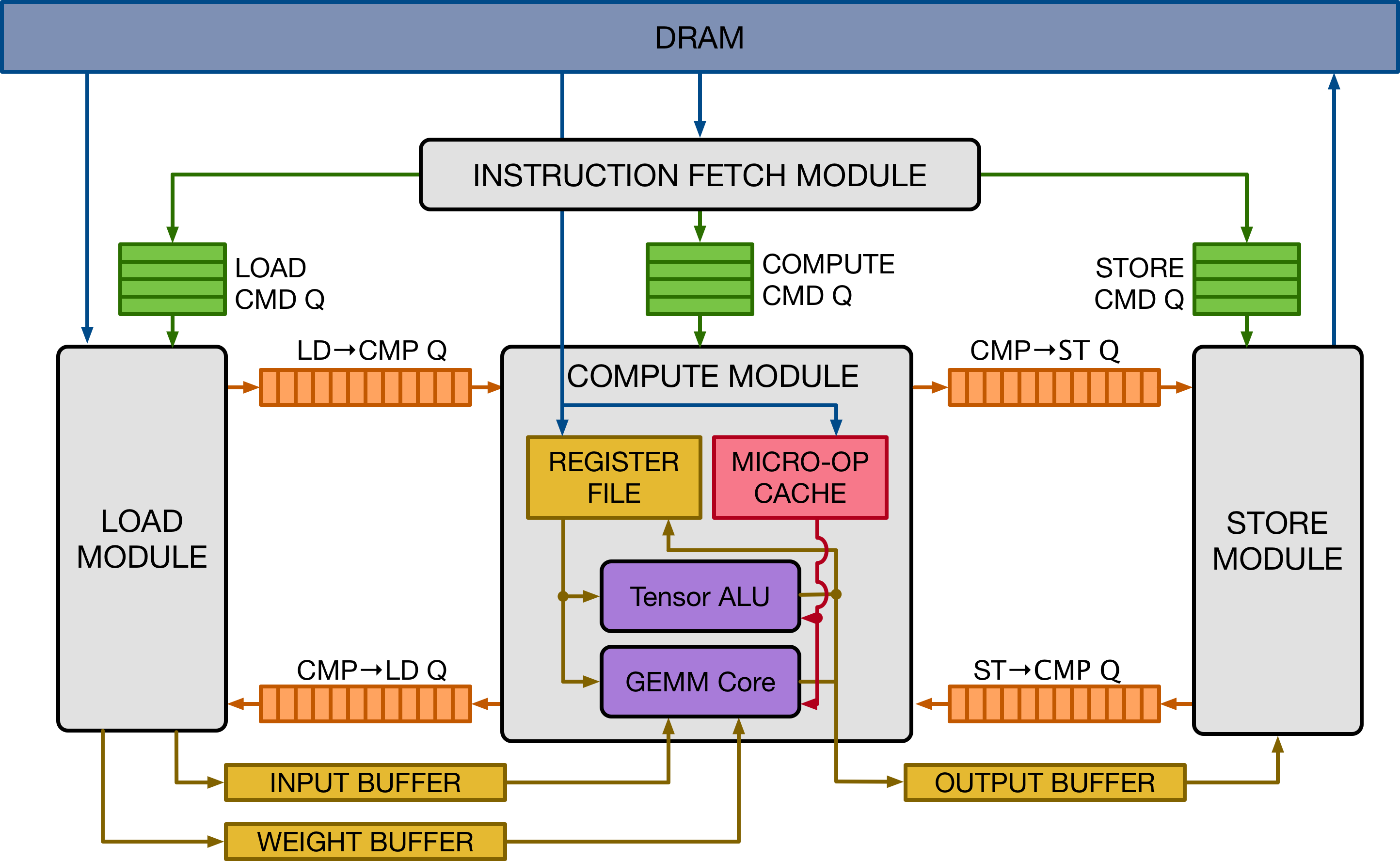
上图给出了 VTA 硬件组织的高级概述。VTA 由四个模块组成,它们通过 FIFO 队列和本地内存块(SRAM)相互通信,实现任务级 pipeline 并行:
- fetch 模块负责从 DRAM 加载指令流。它将这些指令解码,并将它们路由到三个命令队列的任意一个。
- load 模块负责将输入和权重张量从 DRAM 加载到数据专用的芯片存储器中。
- compute 模块用其 GEMM 内核执行密集线性代数计算,并用其张量 ALU 执行一般计算。它还负责将数据从 DRAM 加载到寄存器文件中,并将微操作内核加载到微操作缓存中。
- store 模块将计算 core 产生的结果存储回 DRAM。
HLS 硬件源代码组织
VTA 设计目前在 Vivado HLS C++ 中指定,只有 Xilinx 工具链支持。 VTA 硬件源代码包含在 3rdparty/vta-hw/hardware/xilinx/sources 目录下:
vta.cc包含所有 VTA 模块的定义,以及顶层 VTA 设计的顶层行为模型。vta.h包含用 Xilinxap_int类型实现的类型定义,以及函数原型声明。
此外,预处理器宏定义在 3rdparty/vta-hw/include/vta/hw_spec.h 目录下。这些宏定义大部分来自 3rdparty/vta-hw/config/vta_config.json 文件中列出的参数。
json 文件由 3rdparty/vta-hw/config/vta_config.py 处理,生成一个编译标志的字符串,来定义预处理器的宏。
makefile 文件用这个字符串,在 HLS 硬件综合编译器和构建 VTA runtime 的 C++ 编译器中,设置这些高级参数。
HLS 模块示例
以下是一个 VTA 模块在 C++ ��中的定义:
void fetch(
uint32_t insn_count,
volatile insn_T *insns,
hls::stream<insn_T> &load_queue,
hls::stream<insn_T> &gemm_queue,
hls::stream<insn_T> &store_queue) {
#pragma HLS INTERFACE s_axilite port = insn_count bundle = CONTROL_BUS
#pragma HLS INTERFACE m_axi port = insns offset = slave bundle = ins_port
#pragma HLS INTERFACE axis port = load_queue
#pragma HLS INTERFACE axis port = gemm_queue
#pragma HLS INTERFACE axis port = store_queue
#pragma HLS INTERFACE s_axilite port = return bundle = CONTROL_BUS
INSN_DECODE: for (int pc = 0; pc < insn_count; pc++) {
#pragma HLS PIPELINE II = 1
// Read instruction fields
// 读取指令字段
insn_T insn = insns[pc];
// Do some partial decoding
// 做部分解码
opcode_T opcode = insn.range(VTA_INSN_MEM_0_1, VTA_INSN_MEM_0_0);
memop_id_T memory_type = insn.range(VTA_INSN_MEM_5_1, VTA_INSN_MEM_5_0);
// Push to appropriate instruction queue
// 推送到合适的指令队列
if (opcode == VTA_OPCODE_STORE) {
store_queue.write(insn);
} else if (opcode == VTA_OPCODE_LOAD &&
(memory_type == VTA_MEM_ID_INP || memory_type == VTA_MEM_ID_WGT)) {
load_queue.write(insn);
} else {
gemm_queue.write(insn);
}
}
}
关于 HLS 编码的一些观点:
- 参数:每个函数的参数列表和接口编译指示,定义了生成的硬件模块公开的硬件接口。
- 按值传递的参数表示的是,主机可以写入的只读硬件内存映射寄存器。例如,这个 fetch 函数有一个
insn_count参数,该参数将被合成为主机写入的内存映射寄存器,设置给定 VTA 指令序列的长度。 - 根据所用的接口编译指示,指针参数可以是:
- 与
m_axi接口编译指示一起使用时,将生成 AXI 请求者接口,提供对 DRAM 的 DMA 访问。 - 与
bram接口编译指示一起使用时,生成 BRAM 接口,将��读和/或写端口公开到 FPGA block-RAM。
- 与
- 将推理传递的 HLS 流与
axis接口编译指示结合,产生模块的 FIFO 接口。硬件 FIFO 在模块之间提供了一种有用的同步机制。
- 按值传递的参数表示的是,主机可以写入的只读硬件内存映射寄存器。例如,这个 fetch 函数有一个
- 编译指示*(pragmas)*:要定义每个模块的硬件实现,编译器编译指示是必不可少的。下面列出了 VTA 设计中使用的几个编译指示,其作用是将实现要求传递给编译器。
HLS INTERFACE:指定合成硬件模块的接口。HLS PIPELINE:通过设置启动间隔目标来定义硬件 pipeline 性能 target。当设置II == 1target 时,它告诉编译器合成的硬件 pipeline 能在每个周期执行一次循环迭代。HLS DEPENDENCE:指示编译器忽略给定循环中某些类型的依赖检查。一个对相同 BRAM 结构进行写和读的循环体,需要 II 为 1。HLS 编译器必须假设最坏的情况,即:向之前写操作更新循环的地址发出读操作:鉴于 BRAM 时序特性,这是无法实现的(至少需要 2 个周期才能看到更新的值)。因此,为了实现 II 为 1,必须放宽依赖检查。注意,当打开此优化时,它会进入软件堆栈,防止写入后读取相同的地址。
本 参考指南 给出了 Xilinx 2018.2 工具链更深入、更完整的 HLS 规范。
架构概述
指令集架构
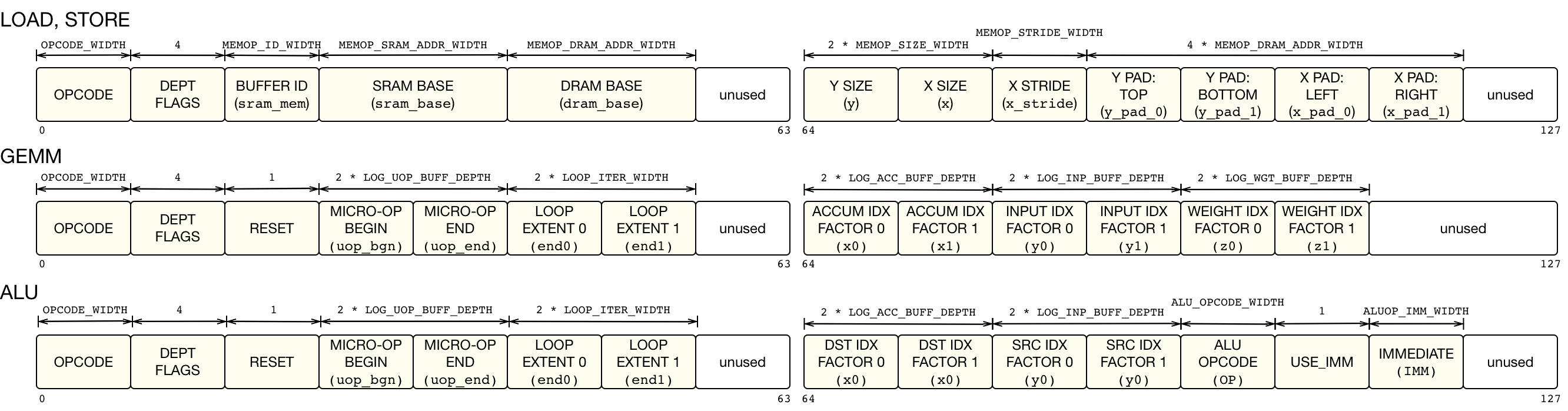
VTA 的指令集架构(instruction set architecture,简称 ISA)由 4 条具有可变执行延迟的 CISC 指令组成,其中两条指令通过执行微编码指令序列来执行计算。
下面列出了 VTA 指令:
LOAD指令:将 2D 张量从 DRAM 加载到输入缓冲区、权重缓冲区或寄存器文件中。它还可以将微内核加载到微操作缓存中。加载输入和权重图块时支持动态填充。GEMM指令:在输入张量和权重张量上执行矩阵-矩阵乘法的微操作序列,并将结果添加到寄存器堆张量。ALU指令:对寄存器文件张量数据执行矩阵-矩阵 ALU 操作的微操作序列。STORE指令:将 2D 张量从输出缓冲区存储到 DRAM。
LOAD 指令由 load 和 compute 模块执行,具体取决于存储内存缓冲区位置 target。GEMM 和 ALU 指令由 compute 模块的 GEMM core 和张量 ALU 执行。最后,STORE 指令由 store 模块独占执行。每条指令的字段如下图所示。所有字段的含义将在 微架构概述 章节进一步解释。
VTA ISA 会随着 VTA 的架构参数(即 GEMM core shape、数据类型、内存大小等)的修改而变化,因此 ISA 不能保证所有 VTA 变体的兼容性。但这是可以接受的,因为 VTA runtime 会适应参数变化,并生成和生成的加速器版本匹配的二进制代码。这体现了 VTA 堆栈采用的协同设计理念,它包含硬件-软件接口的流动性。
数据流执行
VTA 依靠硬件模块之间依赖 FIFO 队列(dependence FIFO queues),来同步任务并发执行。下图展示了给定的硬件模块,如何用依赖 FIFO 队列和单读取器/单写入器 SRAM 缓冲区,以数据流的方式��同时从其生产者和消费者模块执行。所有模块都通过写后读(RAW)和读后写(WAR)依赖队列连接到其消费者和生产者。
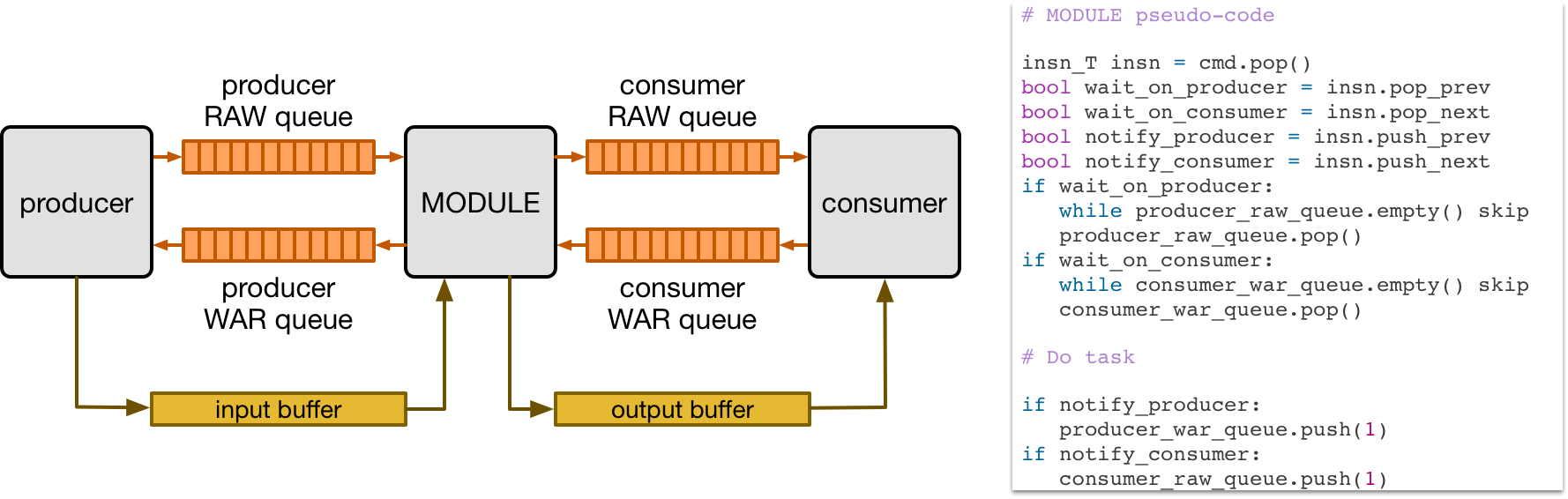
以上伪代码描述了,模块如何基于与其他指令的依赖关系,执行给定指令。首先,每条指令中的依赖标志在硬件中被解码。若指令具有传入的 RAW 依赖,则基于从生产者模块接收到 RAW 依赖 token 执行。
类似地,若任务具有传入的 WAR 依赖,则基于从消费者模块接收到 WAR 依赖 token 执行。最后,任务完成后,检查输出的 RAW 和 WAR 依赖关系,并分别通知消费者和生产者模块。
此场景中的依赖 token 是无信息的。这是因为每个模块执行的指令是以 FIFO 顺序到达,无法按设计重新排序。
pipeline 可扩展性
默认的 VTA 设计由四个模块组成,它们描述了3 个阶段的 load-compute-store 任务 pipeline。遵循数据流硬件组织原则,可以扩展 VTA pipeline,使其包含更多阶段。
例如,设想将张量 ALU 与 GEMM core 分离,从而最大化利用 GEMM core。将产生一个密切反映 TPU 设计的 load-gemm-activate-store 任务 pipeline。然而,添加更多阶段是有代价的:它会增加存储和逻辑开销,这就是默认选择 3 个阶段的 pipeline 的原因。
微架构概述
本节描述了构成 VTA 设计的模块。模块定义包含在 3rdparty/vta-hw/hardware/xilinx/sources/vta.cc 中。
Fetch 模块
VTA 由线性指令流编程。fetch 模块是 VTA 到 CPU 的入口点,通过三个内存映射寄存器进行编程:
- 读写
control寄存器启动 fetch 模块,然后读取它来检查其是否完成。 - 只写
insn_count寄存器设置要执行的指令数。 - 只写
insns寄存器设置 DRAM 中指令流的起始地址。
CPU 在 VTA runtime 分配的物理连续的 buffer 中,准备 DRAM 中的指令流。指令流就绪后,CPU 将起始物理地址写入 insns 寄存器,将指令流的长度写入 insn_count 寄存器,并在 control 寄存器中断言启动信号。此过程会启动 VTA(通过 DMA 从 DRAM 读取指令流)。
访问指令流时,fetch 模块会对指令部分解码,并将这些指令推送到命��令队列中,这些指令队列会送到 load、compute 和 store 模块中:
STORE指令被推送到存储命令队列,供 store 模块处理。GEMM和ALU指令被推送到计算命令队列,供 compute 模块处理。- 描述微操作内核或寄存器文件数据的加载操作的
LOAD指令被推送到计算命令队列,供 compute 模块处理。 - 描述输入或权重数据的加载操作的
LOAD指令被推送到加载命令队列,供 load 模块处理。
当其中一个命令队列被填满,fetch 模块会停止,直到队列恢复未满状态。因此,命令队列的大小要足够大,允许较宽的执行窗口,还允许多个任务在 load-compute-store pipeline 中同时运行。
Compute 模块
VTA 的 compute 模块充当 RISC 处理器,在张量寄存器(而非标量寄存器)上执行计算。两个功能单元改变寄存器文件:张量 ALU 和 GEMM core。
compute 模块从微操作缓存中取出 RISC 微操作执行。有两种类型的计算微操作:ALU 和 GEMM 操作。为了最小化微操作内核的占用空间,同时避免对控制流指令(如条件跳转)的需求,compute 模块在两级嵌套循环内执行微操作序列,该循环通过一个仿射函数计算每个张量寄存器的位置。这种压缩方法有助于减少微内核指令的占用空间,适用于矩阵乘法和 2D 卷积,这在神经网络算子中很常见。
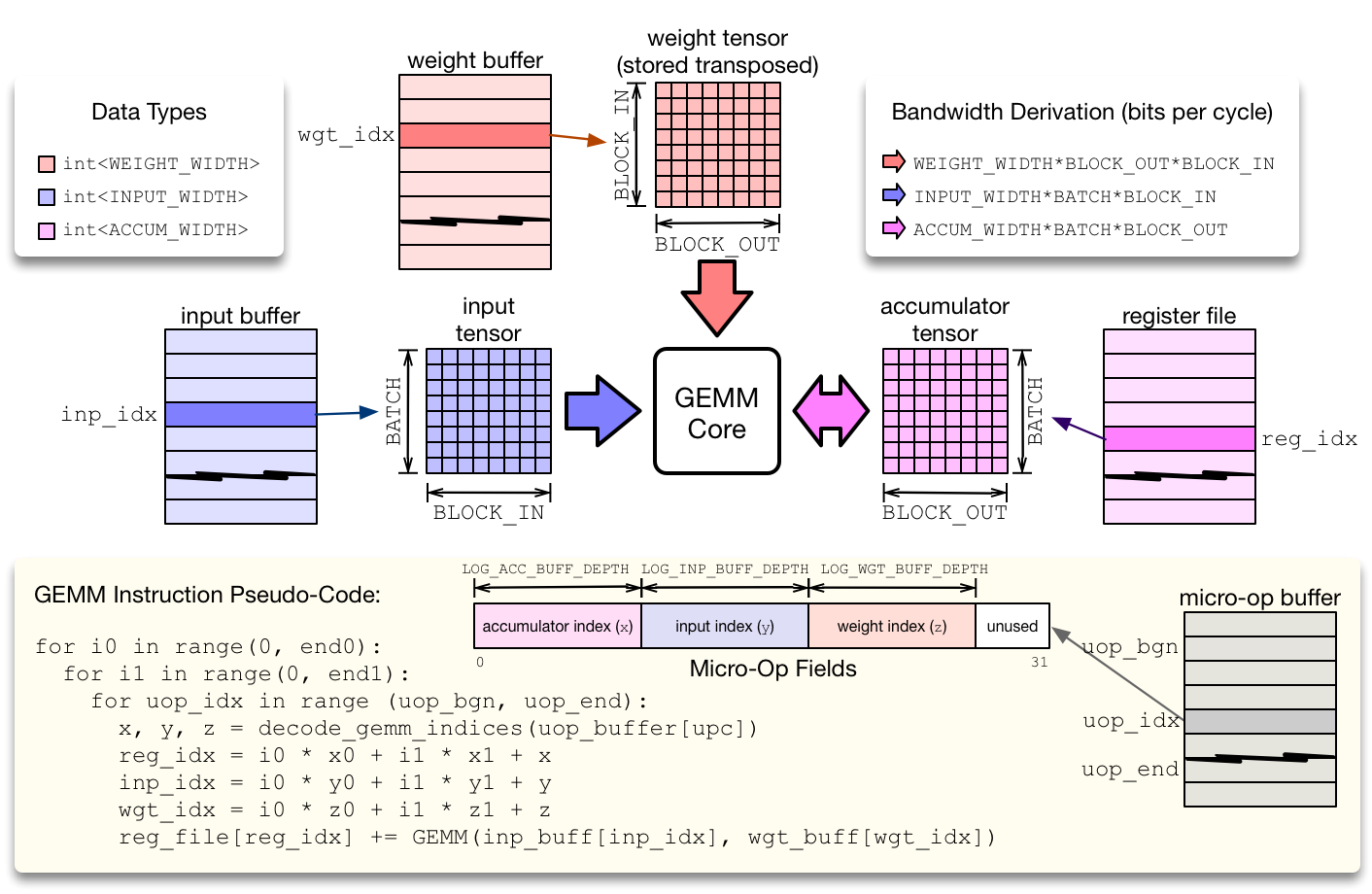
GEMM core 通过在 2 级嵌套循环(如上图所示)中执行微代码序列来评估 GEMM 指令。GEMM core 每个周期可以执行一次输入权重矩阵乘法。单周期矩阵乘法的维度定义了 TVM 编译器将计算 schedule 降级后得到的硬件张量内联函数。
这种张量内联函数由输入、权重和累加器张量的维度定义。每种数据类型的整数精度不同:通常权重和输入类型都是低精度(8 位或更少),而累加器张量具有更宽的类型(32 位),防止溢出。为了让 GEMM core 保持高利用率,每个输入缓冲区、权重缓冲区和寄存器文件都必须提供足够的读/写带宽。
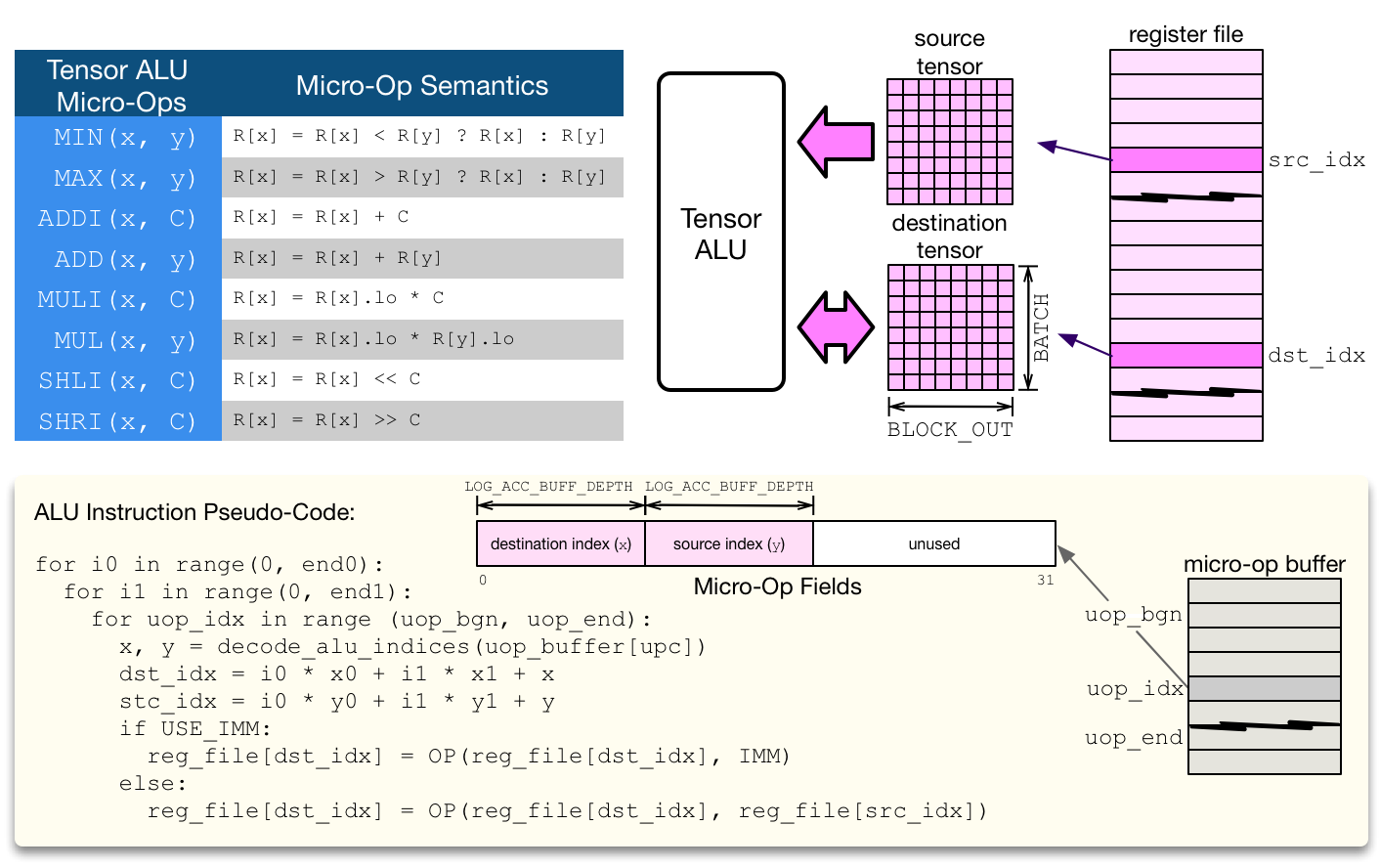
Tensor ALU 支持一组标准操作来实现常见的激活、归一化和池化操作。VTA 的设计遵循模块化原则,Tensor ALU 支持的算子范围可以进一步扩大,但代价是消耗更多的资源。
张量 ALU 可以执行张量-张量运算,以及对立即值执行张量-标量运算。张量 ALU 的操作码和立即数由高级 CISC 指令指定。张量 ALU 计算上下文中的微代码只负责指定数据访问模式。
在计算吞吐量方面,Tensor ALU 的执行速度不是每个周期一个操作。缺少读取端口会带来一些限制:由于每个周期可以读取一个寄存器文件张量,因此张量 ALU 的启动间隔至少为 2(即每 2 个周期最多执行 1 个操作)。
此外,一次执行单个张量-张量操作可能会很耗时,尤其是寄存器文件类型很宽(wide),通常是 32 位整数。因此,为了平衡 Tensor ALU 与 GEMM 核心的资源利用率,默认情况下,张量-张量操作是通过多个周期的向量-向量操作来执行的。
Load 和 Store 模块
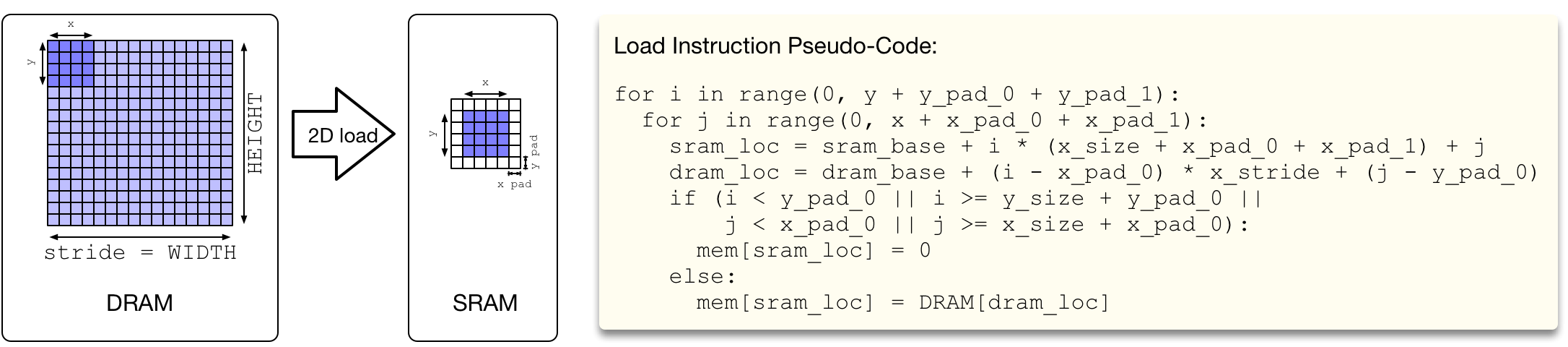
load 和 store 模块使用从 DRAM 到 SRAM 的跨步访问模式执行 2D DMA 加载。此外,load 模块可以动态插入 2D 填充(在阻塞 2D 卷积时很有用)。这意味着 VTA 可以平铺 2D 卷积输入,而无需补偿在 DRAM 中重新布局数据在输入和权重块(weight tiles)周围插入空间填充的开销。